当你闭着眼睛用手指轻抚桌面,能分辨出玻璃的冰凉、木材的纹路、布料的柔软——这种人类与生俱来的“触觉”,正成为科学家们争相赋予机器人的新能力。
未来手术机器人能感知血管的搏动,假肢能给截肢者带来真实的握感,甚至手机屏幕能摸出不同图标的纹理差异。这一切的实现,都离不开一种正在崛起的感知技术——磁触觉传感(magnetic tactile sensing)。
宁波东方理工大学讲席教授李润伟团队系统梳理了磁触觉传感材料与器件的研究进展,从材料组成、结构设计到器件工作机制,呈现了该领域的发展脉络与关键科学问题。也就是说,我们正在研究如何让机器人具有更加灵敏的触觉。
近日,相关研究成果发表在《材料研究评论》(Review of Materials Research)。
为何是“磁”?
在日常生活中,触觉传感器更像一个“压力开关”——按下去,电路接通。但磁触觉走的是另一条路:它不是直接测量压力,而是通过“磁场变形”来反推外力。
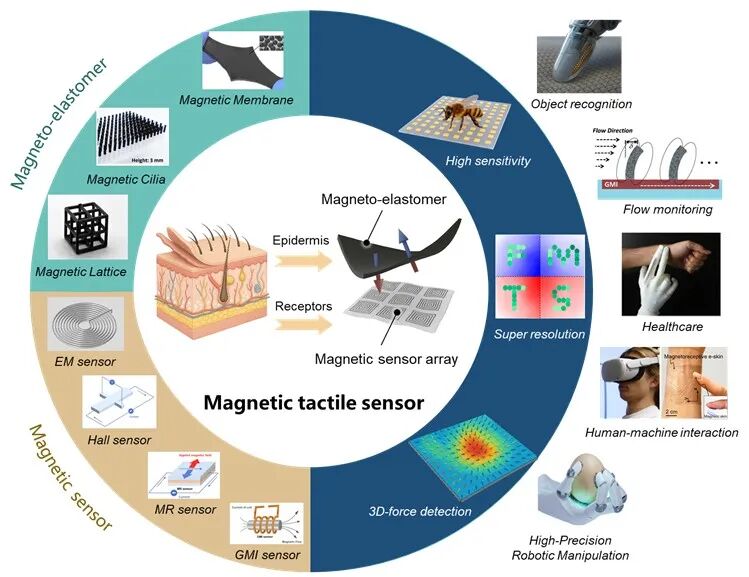
磁性触觉传感器的主要部件、特性和潜在应用。课题组供图
这带来了几个天然优势:
信号解耦能力强:可以“隔空感知”——磁铁和探测芯片不必贴在一起,中间隔着保护层也能工作,这为设备防水、防腐蚀留出了空间。
环境鲁棒性高:不怕脏、不怕潮——水滴、油污、灰尘几乎不影响磁场信号的稳定,这一点在工业流水线或医疗场景中尤为关键。
结构设计灵活:适合柔性、可拉伸甚至封装体系。
多维力感知潜力:能“分辨”力的方向——普通传感器通常只能感知“按了多大力”,而磁方案还能感知“是推还是拉”“有没有扭转”。这种多维力感知能力,是精细操作的前提。
秘密藏在“混料”里
通过将永磁微粒引入弹性基体,实现外力作用下的磁场分布变化,是当前最主流的材料设计策略。将磁粉掺进柔软的硅胶或弹性体里,做成一块能变形、能回弹的“磁性橡胶”。
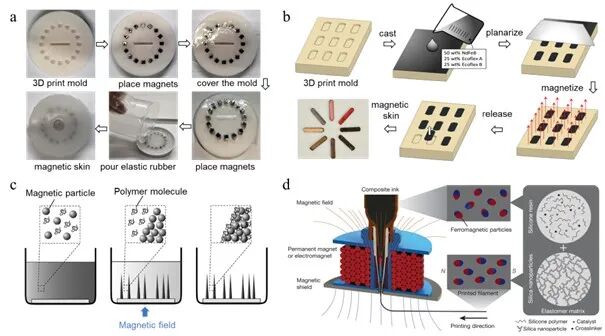
在弹性聚合物基体中,嵌入块状永磁体。课题组供图
当外力按压这块材料,内部的磁粉分布发生改变,周围的磁场也随之变化。贴在旁边的感应芯片捕捉到这种变化,就能反推出受力的大小和方向。
但问题随之而来:磁粉怎么掺、掺多少、颗粒怎么排列,都直接影响传感器的灵敏度与稳定性。 掺多了材料变硬,掺少了信号太弱。颗粒方向杂乱无章,磁场变化就不规律。
这正是李润伟团队重点关注的方向——不是简单地找一种材料,而是设计一套从配方、结构到工艺的系统方案。
结构设计决定磁触觉性能
李润伟表示,磁触觉传感的性能并不由材料本征参数单独决定,而高度依赖结构设计。材料与结构的协同设计,是推动磁触觉传感器从概念验证走向复杂系统应用的关键。
比如,在磁性薄膜表面做出微小的金字塔阵列或柱状结构,同样按下去,形变更集中,磁场变化更显著,灵敏度就能成倍提升。
再比如,磁铁在上、芯片在下,与磁铁在侧、芯片在中,两种布局感知到的信号特征完全不同。合理的设计甚至能实现“一感多测”——按一下,同时算出压力、剪切力、扭转角度。
从“实验室”到“指尖”
尽管实验室已能做出柔韧如皮肤、感知硬币轻重的磁触觉薄膜,但距离大规模应用仍有几道硬门槛:
稳定性——反复按压成千上万次,磁性复合材料的磁场会不会衰减?橡胶会不会疲劳?
可制造性——实验室手工贴片可行,但大规模生产时,如何保证每片传感器的磁场特性一致?
集成度——既要柔性、又要高灵敏度、还要低功耗,如何平衡这些矛盾?
未来突破仍将依赖磁性材料设计、柔性结构工程与器件集成策略的深度融合。
回到最初那个问题:为什么我们要给机器人赋予触觉?
因为触觉是人类理解世界的底层语言。没有触觉的机器人,就像戴着厚手套做手术的外科医生——能看见,却不敢用力。而磁触觉传感,正凭借它对环境不敏感、对力方向敏感、结构灵活等独特优势,成为打开这扇门的一把钥匙。
从磁性橡胶的配方调试,到微结构的精巧雕刻,再到柔性电路的集成封装,李润伟团队勾勒出一幅清晰的路线图:材料是基石,结构是杠杆,应用是终点。
也许用不了太久,当你和机器人握手时,会惊讶地发现:它的手心,会带来温度的触感。
中国科学院宁波材料技术与工程研究所博士生吴嘉锋为论文的第一作者,李润伟为通讯作者,合作者还包括中国科学院宁波材料技术与工程研究所研究员杨华礼等。
该项目得到国家重点研发计划项目、国家自然科学基金项目、浙江省自然科学基金重大项目、宁波市基金等的资助。
相关论文信息:
https://doi.org/10.1016/j.revmat.2025.100110
课题组介绍 ▼

李润伟
讲席教授
材料科学与工程学院院长
课题组研究方向为柔性/弹性功能材料与器件研究,包括柔性/弹性功能材料设计与制备研究、柔性/弹性磁电敏感材料与传感技术研究,以及智能仿生材料与功能集成器件研究等。
联系方式:
rwli@eitech.edu.cn